Our robot will use a rangefinder to detect the can. One of the motors will go forward while the other goes backwards so the robot will rotate around itself. Once the rangefinder detects the can, the robot will move forward to tip the can. We will place a switch in front of our robot so when the can press the switch our robot will reverse and stop after a few seconds.
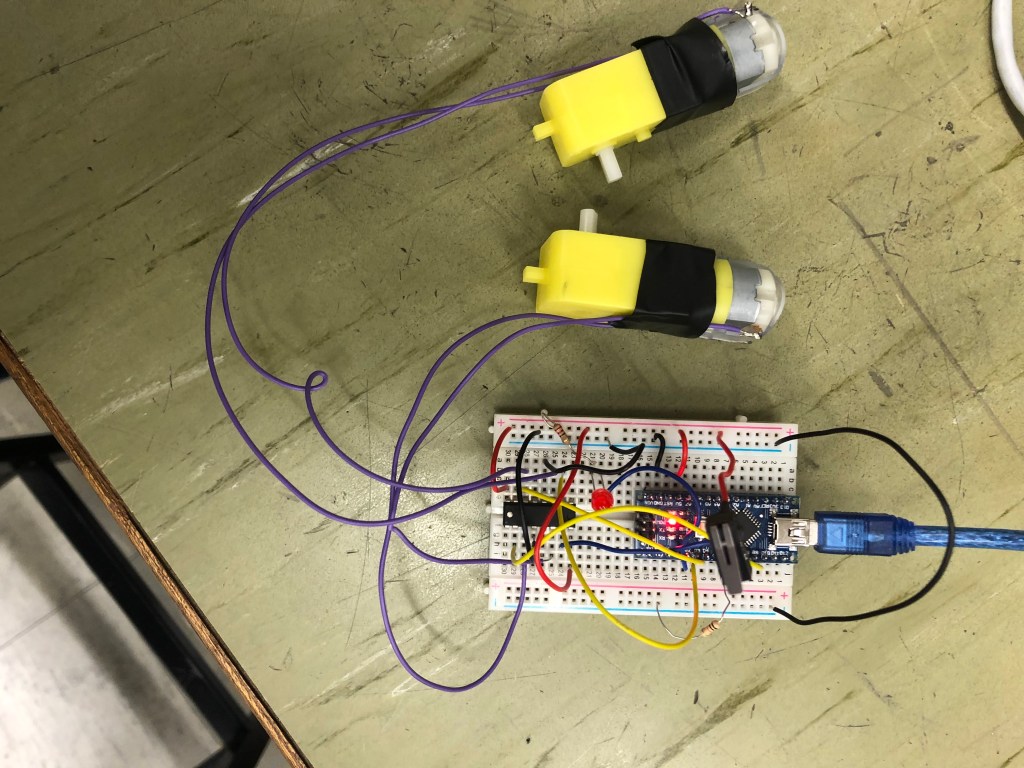
One of my colleagues was capable of telling me precisely which driving chip pin was attached to each of the sensors, as well as the motors and the LED. Most of my time was spent on the code. It was hard to program the robot to perform these movements. In the end, we worked it all out, but we could not test it because our robot was not built yet.